如果开发一个塔防游戏,很自然的会遇上这么两个名字很像的问题:
- Path-finding: 如果知道起点和终点,如何在其间找到一条路径
- Path-following: 已知从起点到终点的路径,物体如何才能沿着它行进
本文将要讨论的是第二个问题 path following,给定一条路径,看物体如何沿着它从起点运行至终点。为了方便描述,接下来的内容中,用单词 Boid 来表示行进的物体或塔防中的敌人。
接下来会用一种简单的方法来解决这一问题,最终完成的代码库可见 GitHub: boid-path-following,repo 的多个分支对应了文中的不同步骤。
准备工作
先来看看如何标识出画面中的位置,首先画面被一系列的横纵线分成了许多网格,对于地图范围内的一个点,它会有自己的像素坐标 (x, y),同时它所处的格子也有自己的坐标 (col, row) 或 (xIndex, yIndex),表示所处的列和行。
为了区分,下文中提到像素坐标即为用像素表示的坐标,网格坐标表示点在网格中的列和行。
在这种表示方法下,还需要一个工具函数
index2Px(col, row),用于计算格子中心的像素坐标。
接下来给出路径的坐标,路径是如下的一个二维数组:
1 | const path = [[0, 1], [COLS - 4, 1], [COLS - 4, 4], [6, 4], [6, 7], /* 部分省略 */] |
每一项都是路径上一个点的网格坐标,将这些点用直线连接起来后就得到了 boid 行进的路径。我们的目标就是要让 boid 能够从路径第一个坐标移动至最后一个坐标。
Boid 如何沿直线前进
先考虑最简单的问题,如何让 Boid 沿着一条直线行进。
物体的移动需要位置和速度,为了表示其像素坐标,boid 需要
x, y 属性;其速度需要 speed
属性,同时还需要一个
angle,以便计算出速度在两个方向上的分量 vx,
vy。
动画效果的实现需要用 requestAnimationFrame
函数,每一秒为60帧,每一帧中都会执行一次循环,在其中改变位置:
下一时刻的位置 = 当前时刻的位置 + 速度1 | // 示意代码 |
在每一个循环中,boid 的位置都会发生变化,在新的位置上将其画出即可看到 boid 沿直线运动的效果。
这一部分可在示例代码库的 demo01/go-straight
分支上查看:
git checkout demo01/go-straight
npm run demo01现在 boid 已经动起来了,但是却没法停止,这就是我们接下来需要考虑的问题。
如何让 boid 在目标点处停止
要让 boid
能够知道自己到达了目标点,则在每一次循环过程中,需要计算出此刻离目标点的距离分量
dx,dy,据此算出距离
dist,将其与速度 speed 进行比较。如果
dist > speed,说明物体离目标点还挺远,继续将速度加到位置上即可。反之则表明物体将要到达终点,此时若直接加上速度,boid
可能会越过目标点,因此需要一点不同的处理。
1 | // 示意代码 |
这一部分可在示例代码库的 demo01/stop 分支上查看:
git checkout demo01/stop
npm run demo01此时,到达了终点的 boid 被清除而不再显示。
如何让 boid 能够转向
前面叙述中为了简化,路径中只有起点和终点,所以 boid 没有机会转向,那当路径变复杂了之后,boid 该如何运动?
前面已经提到过,path
是一个记录了路径网格坐标的数组,boid
会从中取一个坐标作为自己的当前目标点,然后一直向前行进,到达了这个目标点之后,它会从
path
数组中取出下一个坐标,继续移动至该位置。循环以上过程,直到 boid 到达
path 中的最后一个坐标。
上面的代码中,我们的目标点 target 固定为
path 的最后一个坐标,而现在每一次转向时 target
都会变化,所以加入这样的两个变量:
waypoint表示当前目标点的索引angleFlag记录是否需要转向。
1 |
|
这一部分可在示例代码库的 demo01/steering
分支上查看:
git checkout demo01/steering
npm run demo01结果可见下图: 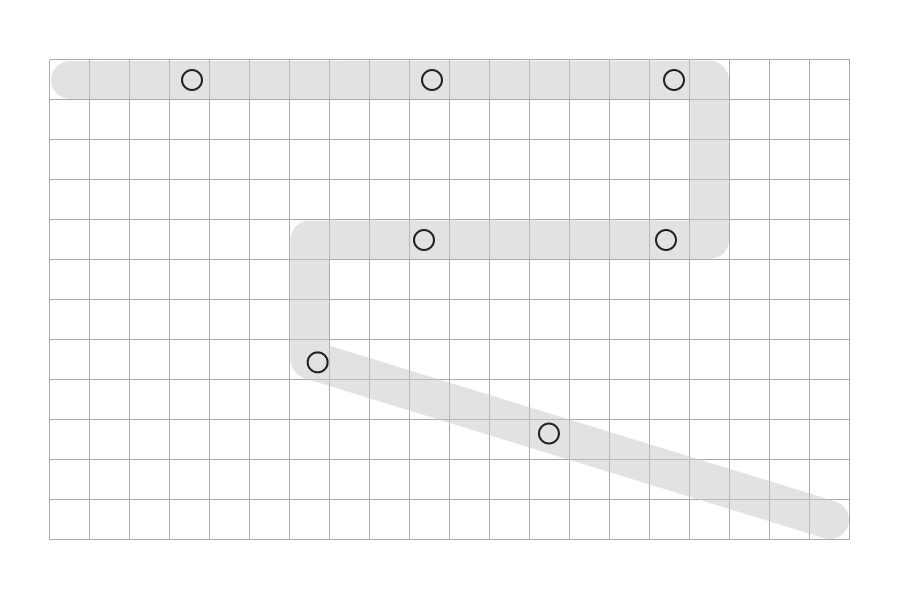
到此为止,这种 boid 沿路径行进的方法已经讲解完毕了。建议读者查看一下 repo 中的代码,自己修改部分代码,比如更改路径,看结果会有何不同。
其它的方法
这一种方法中的确实现了沿路径移动的效果,但是有点儿单调,boid 只能在路径的中轴线上移动,而且它们之间也没有交互的效果。The Nature of Code 这本书的第六章 Autonomous Agents 中介绍了另一种稍微复杂的方法来实现 path following。
我之前参考他人的代码实现了这种方法的一个演示版本,其代码在此处。
(也许之后会补一篇博客来介绍 The Nature of Code 中的实现,但谁知道会不会写呢🤔)
结语
最后,我最近在写的这个塔防游戏中就使用了本文介绍的 path following 方法。虽然游戏还没完成,但点进去看看再给个 star 又不费电😀。

